Microcontroller Board
- Arduino Uno
Arduino Uno R3
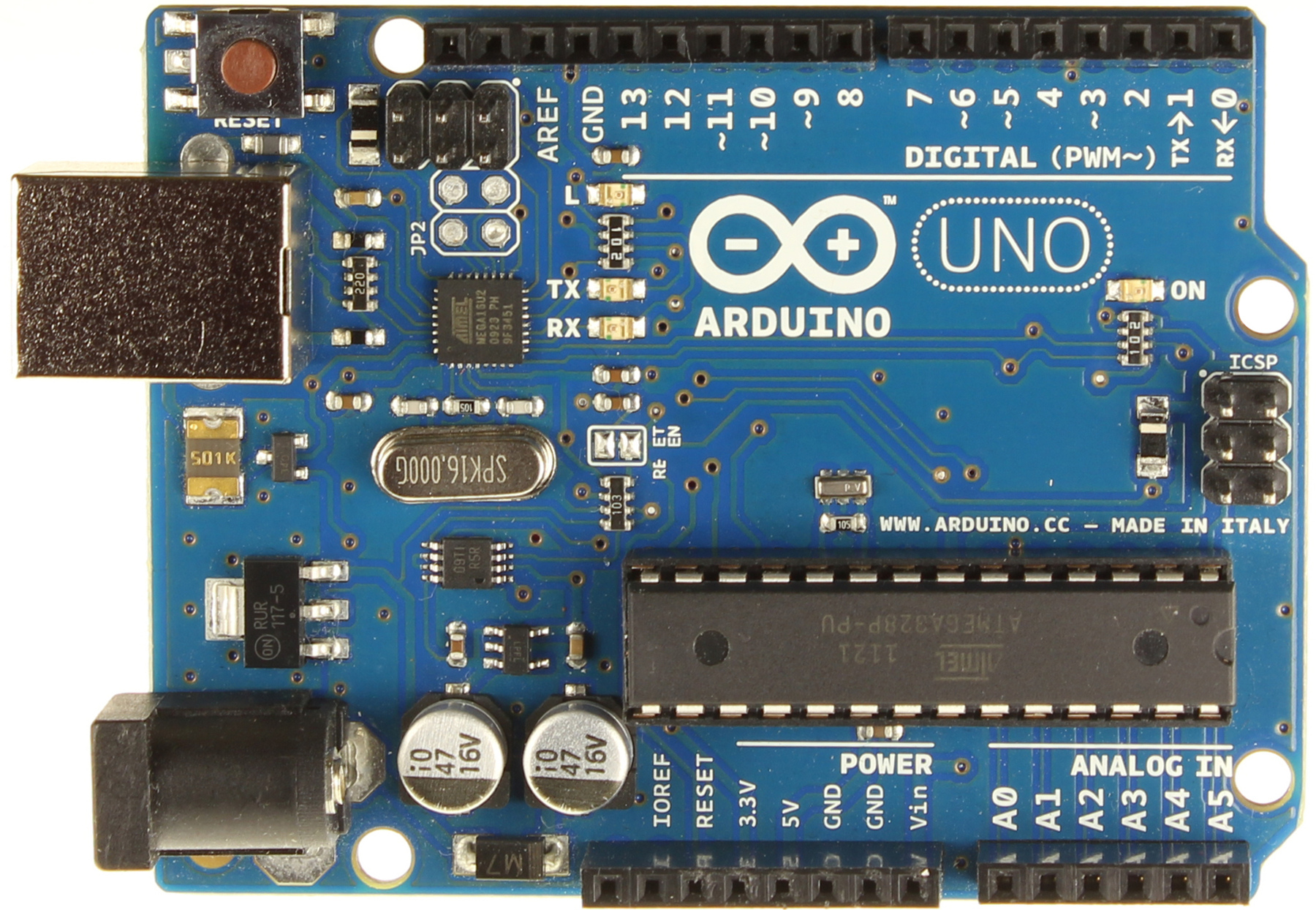
Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. The model on the robot is an Uno revision 3 (shown right). This has six analogue input pins and fourteen digital input/output pins. My project is using nine of the digital pins and none of the analogue pins. The Arduino is programmed using a variant of the C programming language.
I am using the Vin and one of the GND pins to supply the arduino from the 5volt regulated output from the motor driver board. This is temporary, as I intend to feed the arduino from the second battery pack as the robot grows. I am using the 5V and the other GND pin on the arduino to feed power to the ultrasonic range finder and the servo.
The Arduino has a type B USB socket which allows it to be connected to a PC via a standard USB A to B lead (such as that used on many printers) to allow easy programming.
I used M3x17mm spacers and M3x6mm screws to fix it to the chassis. The chassis had to be drilled because none of the pre-drilled holes line up with the Arduino.
Input/Output Wiring Guide
| Arduino Pin | Wire Colour | Device | Device Pin |
|---|---|---|---|
| 0 | Not Used | ||
| 1 | Not Used | ||
| 2 | White | Ultrasonic Range Finder | Echo |
| 3 | Brown | Servo | White Wire |
| 4 | Orange | Ultrasonic Range Finder | Ping |
| 5 | Not used | ||
| 6 | Green | Motor Driver | Enable L1-L2 |
| 7 | Blue | Motor Driver | L2 |
| 8 | Blue | Motor Driver | L1 |
| 9 | Not Used | ||
| 10 | Green | Motor Driver | Enable L3-L4 |
| 11 | Blue | Motor Driver | L4 |
| 12 | Blue | Motor Driver | L3 |
| 13 | Not Used (onboard LED) | ||